
3DF Zephyr Aerial是一款专业的三维模型设计软件。三维模型设计师都在使用的三维模型设计神器3DF Zephyr Aerial。用户可以通过它完成一系列的模型设计,可以满足不同用户的设计需求。该程序集成了多个功能模块,使摄影测量在许多情况下都很流行,从而培养出不同的目标和要求。该系统的内部技术非常丰富并且易于使用,并且可以轻松地适应用户的需求;该程序允许使用任何传感器和任何采集技术拍摄的图片和视频数据进行自动3D重建,可以在相同的测量和扫描过程中执行该操作,可以使用不同的相机,镜头和焦距;该程序支持在单个软件平台上处理视频,球形图片,多光谱和热成像,还支持RGB图像处理,并且可以充分利用航空摄影和地面摄影测量技术,还支持导入,注册和分析激光扫描数据;需要它的用户可以下载体验。
软件特色:
DF3DF Zephyr具有四个功能强大的功能模块:最受欢迎的功能模块:Pro,Aero,Lite和free。
DF3DF Zephyr Aviation是专用的最完整版本,其构想是用于地形,城市监控,自然灾害,采矿,无人机和精确农业应用。
DF3DF Zephyr Pro是为诸如建筑,考古学,医学和牙科以及人体扫描等应用程序构想的标准解决方案。
DF3DF Zephyr Lite / 3DF Zephyr Lite Steam Edition是商业解决方案,适用于仅需要3D网格的小型企业,艺术家或普通用户和/或不需要其他版本中所有可用工具的用户。
DF3DF Zephyr Free是完全免费的版本,非常适合与客户,朋友和同事共享您的项目文件。
尽管存在严重的计算限制(例如,最多可以使用50张图片),它仍然是一个不错的查看器,也是学习摄影测量技术的理想方法。
安装步骤:
1.用户可以单击本网站提供的下载路径下载相应的程序安装包
2,只需使用解压功能打开压缩包,双击主程序进行安装,并弹出程序安装界面

3.同意协议条款,然后继续安装应用程序,单击同意按钮
4.您可以单击浏览按钮来根据需要更改应用程序的安装路径。

5.弹出应用程序安装进度栏加载界面,等待加载完成

6.根据提示单击“安装”,弹出程序安装完成界面,单击“完成”按钮。

软件功能:
加快运动管道的全局结构(所有版本)
运动重建引擎的结构已更新,可提供更快的*稀疏点云重建
网格光敏性优化,在重建网格时提取更多细节,激光扫描格式支持与全局光束调整扫描对齐
从Faro的.fls和.fws文件格式中,您将能够直接在3DF Zephyr Pro中查看这些本机格式。
手动和自动折线提取,可快速轻松地生成图形元素(并以.dxf格式导出)
手动绘制图片还是让Zephyr为您完成工作
在您的点云扫描中,通过多种ICP注册算法自动轻松地注册Zephyr。
激光扫描点云可以直接在Zephyr和3.0中进行着色,从而使此过程更加容易。
使用说明:
3在3Dflow中,我们是第一批计算机视觉研究人员。通常,计算机视觉是研究如何从图像中提取(任何有用的)信息的科学。这是一个非常粗糙的定义,可以描述许多子问题,并且可以为“信息”的概念赋予许多不同的含义。从许多图像中提取3D模型(来自2D输入的3D信息)是Computer Vision中经过充分研究的问题。 3DF Zephyr代表了针对此问题的高度精炼和精心设计的解决方案。
EphZephyr分为三个主要阶段:
开始一个新项目并定义摄影机姿势-也称为“运动结构
生成3D模型
提取密集点云-也称为“多视图立体”
提取面
提取纹理网格
开始当开始一个新项目时,软件将提取相机的外部参数(位置和方向)及其内部参数(即焦距和其他相机属性)。这一阶段的所有魔力都是由Motion Technology的领先机构Samantha完成的。如果要手动输入内部摄像机参数
而不是让萨曼莎(Samantha)估计它们,您可以。
调整相机的方向后,您可以继续生成3d模型。此步骤分为两个阶段:
提取密集的重建。此过程要求输入摄像机正确。如果您认为相机的方向不正确,则可以将其从工作空间中删除。您还可以在继续操作之前限制或扩大重建的大小。致密化阶段由我们的多视图立体声技术Stasia管理,该技术为重建过程提供了动力。您可以创建不同的密集重建(具有不同的参数)并将其保存到工作空间中。
创建从密集的重建中创建三角形网格。根据要重建的内容,可以选择生成平滑的表面(例如,在处理人体或地形时),也可以选择生成更有利于建筑物或机械等场景的锐利表面部分。后者的表面由3Dflow开发的网格划分算法Sasha处理。
每个网格多边形都基于其可见性和质量使用最合适的图片进行纹理处理。在纹理生成阶段,还有一种颜色平衡算法,该算法允许用户通过检查照片上的不同光照变化来自动选择和设置每个像素的最佳颜色。
DF3DF Zephyr是全自动的,但需要一定的先见之明才能产生最佳效果。
相机传感器
选择设备时请记住:
相机性能不是由其百万像素分辨率决定的。
高端相机并非总能带来更好的效果。
好的相机必须允许全面的光线管理来控制每个曝光值。因此,即使无反光镜相机和桥式相机也可以满足这一需求,通常建议使用DSLR相机(通常称为“反射”相机)。
相机传感器是关键因素,以下提示可能会有所帮助:
像素大小必须大于2 µm。因此,强烈建议使用传感器大于1 / 2.3英寸的相机,即使根据您要达到的精度可以使用较小的传感器也是如此;
注意像素大小,而不是每张图片的像素数。例如,如果使用36百万像素全画幅反射(35.9 x 24毫米),则建议以低于提供的最大分辨率的分辨率进行拍摄。即使像素更少,也最好使图像中的像素更大。
镜片。
每次调查都有其自身的特征和条件,因此,选择最合适的镜头取决于环境条件(光线,视野中的障碍物,用户的移动能力)以及被调查对象/场景的特征。提供以下提示以选择合适的摄影器材:
全画幅相机:使用焦距在25到50毫米之间的镜头;
具有APS-C传感器或更小传感器尺寸的相机:请考虑焦距值在1.5到1.6之间的情况,并使用焦距值在18到35 mm之间的镜头;
强烈建议您对所有拍摄的照片保持相同的焦点。即使Zephyr可以在同一项目中同时处理多种类型的相机和镜头,但如果使用一致的设置,则可以获得更好,更快的结果。
射击技巧。
捕获图像的技术需要根据主题和情况进行调整。以下是一些常见情况的建议。
平行轴捕捉

使用在建筑和航空摄影测量等应用中的平坦或规则表面上使用此技术。白色三角形表示摄像机的位置及其视野。
会聚轴捕获

使用当您可以在主题/场景中移动时使用此技术
室内射击

使用在室内拍摄时使用此技术。
如果要完全重建中小型物体,可以将相机固定在一个固定位置(例如在三脚架上),然后将其放在转盘上。然后3DF Masquerade将隐藏图片中的背景。
通用规则。
将主题保持在屏幕中央;
避免使用直射光源以避免阴影并覆盖表面区域;
避免使用高ISO值,因为噪声可能会对Zephyr中的运动相位产生不利影响;
保持光圈值尽可能高(f / 8-F / 16),因为它有助于在照片上获得更大的景深;
避免照片模糊。使用高质量的相机和良好的照明设置会有所帮助。如有必要,请考虑使用三脚架。
很多每张照片之间有很多重叠(70-80%)。这可能是最重要的提示。尽可能多地拍摄照片。您正在拍摄的场景的每个部分都应该出现在从不同位置截取的至少三个单独的视图中。这是最低要求,
更多照片可能会改善最终结果。
限制照片之间的角度。在物体周围移动时,请尝试使每张照片之间的角度保持较小。
拍摄具有许多细节和纹理的场景。照片中的视觉纹理将它们连接起来。 3DF Zephyr在均匀或高度重复的纹理上效果不佳,在镜子或透明物体上也完全不起作用。但是,您可以使用3DF Masquerade(与3DF Zephyr捆绑在一起)覆盖某些区域。
不要尝试调整镜头失真,因为在Motion的“结构”的第一阶段,此错误非常重要。
即使3DF Zephyr可以在同一数据集中处理不同的相机或镜头,也可以通过使用具有相同焦距的相同相机来获得更好的效果。
越多,拍摄的照片越多,效果会更好:拥有更多信息将有助于Zephyr。
请记住,您可以使用Zephyr中的“图像质量指数”来检查正在处理的图片的状态。
打开Zephyr后,界面布局将如下所示:
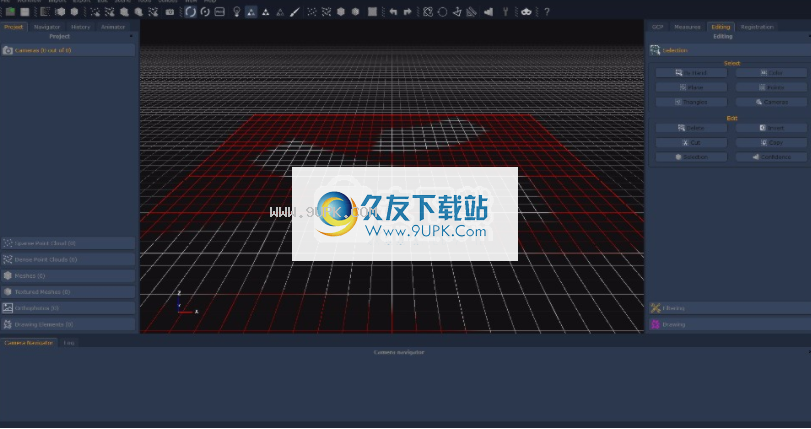
在上方,菜单栏和工具栏使您可以访问Zephyr的所有基本操作和功能。
中心的“渲染”窗口使您可以浏览3D场景。您也可以右键单击它以打开上下文菜单以执行特定操作。
其他窗口完全是“可停靠的”;这意味着您可以将它们移动并停靠在主窗口的任何部分。要隐藏或显示特定的底座,请使用“查看”菜单。
DF3DF Zephyr始终保存并加载上次运行的界面布局。从“工具”>“选项”>“应用程序”>“还原设置”,您可以还原出厂默认设置(包括界面布局)。
在左侧的“项目”选项卡中,您可以查看工作空间中当前加载的所有对象。对象分为4类:摄像机,稀疏点云,密集点云和网格。您可以通过右键单击每个对象并选择特定操作来删除,重命名和编辑每个对象。
导航器选项卡可帮助您导航工作区。
在左侧,您可以找到“动画”选项卡,您可以在其中创建和导出3D模型的视频动画。
右侧有“控制点”选项卡,“测量”选项卡,“注册”选项卡和“编辑”选项卡。
在同一标签上,“历史记录”标签可让您查看,撤消和重做所做的事情。
导航栏位于在Zephyr和“日志”面板中加载的照片的缩略图旁边的底部。
你有相片吗?然后即可开始重建过程!
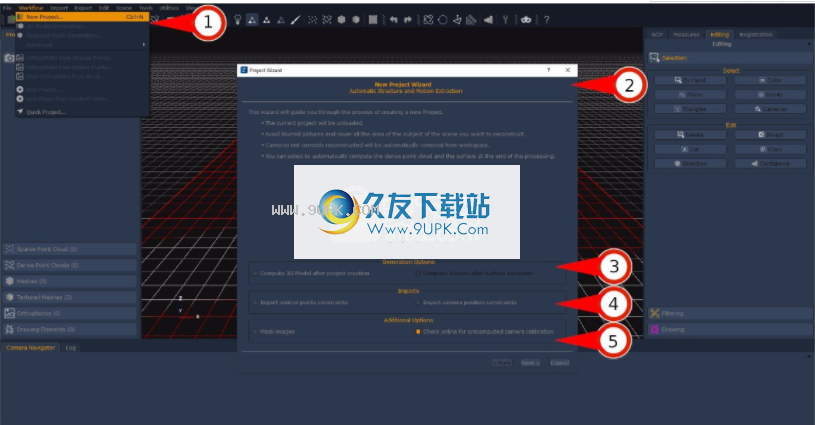
要创建一个新项目,只需单击工作流程>新建项目(1)。将出现“项目向导”(2)屏幕,该屏幕将指导您完成导入图片的过程。
对于标准工作流程,您只需单击“下一步”按钮,然后继续在软件中添加照片。
但是,该向导包含三个子菜单:
发电选项(3)
进口(4)
其他选项(5)。
让我们看看它们的意思。
在“生成选项”面板中,可以将重建管线的其他阶段排队,直到生成带纹理的网格为止。
在导入菜单中,您有两个高级选项:
导入控制点约束:此选项允许您从txt文件中导入地面控制点的2D图像坐标和3D空间坐标。控制点将用于调整重建。请注意,在创建稀疏点云之后,您可以从“将模型对齐到3D坐标”菜单中选择和导入控制点坐标。
导入摄影机位置约束:作为上一个选项,此选项允许您(通过加载txt文件)在3DF Zephyr中导入摄影机位置,并使用它们来约束3D重建。该条目实际使用的标准示例是无人机或无人机系统记录的照片。这些照片将镜头的GPS坐标记录到Exif数据中。请注意,在创建稀疏点云之后,还可以从“将模型对齐到3D坐标”菜单中导入摄像机位置。

在附加选项子菜单(4)中,您可以指示软件执行四个3D重建阶段中的每个阶段,而不必在一个阶段与下一个阶段之间停止。当您没有足够的时间来监视3D重建时
该工具在每个阶段都非常有用。该技术称为批处理,仅建议高级用户使用,因为它代表了3DF Zephyr中最高的自动化水平。
您也可以选择指示Zephyr使用口罩。遮罩是一种技术,可让您专门忽略主体的各个部分,例如在反射,移动物体或背景不再与主体相关的任何其他情况下有用。如果要移动对象或使用转盘,则需要遮盖图像。有关更多信息,请参见3DF Masquerade章节。
附加在附加选项(4)中,通过在线检查预先计算出的相机校准选项,Zephyr可以连接到我们的3DF Zephyr在线数据库:该软件将能够自动下载预校准参数,从而缩短了结构工期从运动阶段开始
在上一个子菜单中,如果以前是使用3DF Masquerade工具生成的,则还可以加载与照片相关的蒙版。单击“下一步”后,将显示“蒙版”页面(请参见上文),该页面将指定是否已将蒙版正确加载到3DF Zephyr中(对于每个导入的蒙版,图片名称附近应显示绿色的“确定”)。
通过选择“在定向期间忽略蒙版”选项,3D Zephyr将不会在第一阶段(移动结构)中利用这些蒙版;如果图像的背景纹理良好,此工具很有用,因此可以帮助相机定位第一阶段。
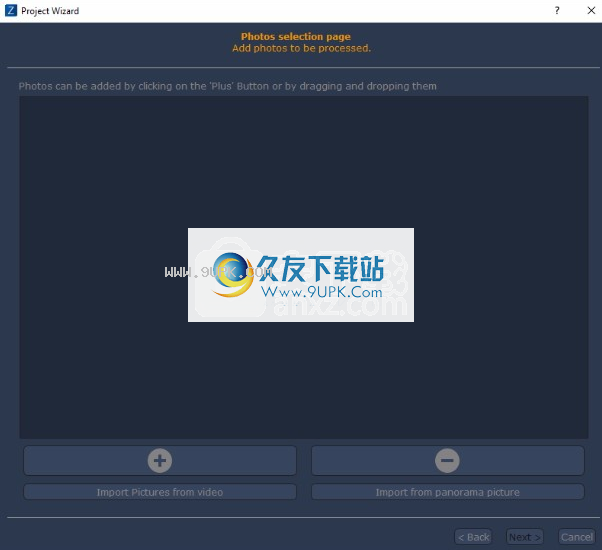
下一个窗口是“照片”选择页面,要求用户加载图片:
您可以将文件“ n”拖放到窗口中,或单击“添加”以选择照片目录。您很可能会使用JPG或PNG,但也可能会使用原始文件格式,例如NEF,CR2,ARW2等。请注意,原始文件通常加载较慢。
DF3DF Zephyr允许您通过“从视频图像导入”按钮导入图像和视频。该工具可以将视频分割成多个帧,然后将其像其他图像一样对待。
如果选择此选项,则可以选择所需的文件,然后指定将保存一组提取的帧的目标文件夹。在下面的选项中,您可以设置要提取的帧速率(FPS),每个帧的模糊分析以及相似帧的识别和拒绝阈值。另外,您可以将不需要考虑的部分视频数据切入帧提取中。
同样,如果您使用的是矩形图像格式,则可以使用“从全景图导入”图片工具:只需使用“加号”按钮选择图像,然后选择矩形图像的哪些边缘应转换为哪些“边缘” ”。
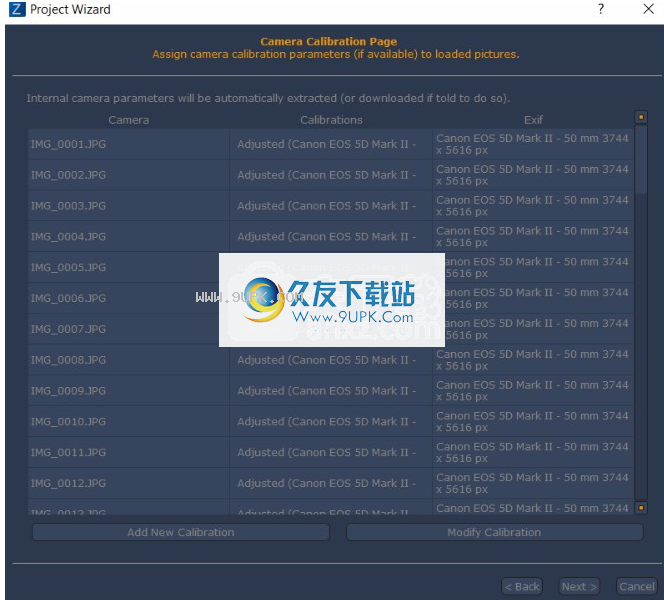
加载图像或视频文件并单击“下一步”按钮后,您将看到“摄像机校准”页面,您将在其中注意到每个导入的图像和校准列表。
3DF Zephyr将用于每个摄像机及其EXIF数据的信息。
通过右键单击窗口,您可以选择或取消选择所有图像并克隆校准。
在此页面上,您可以添加新的校准,或者最终修改3DF Zephyr从照片的Exif数据自动识别的校准。

EphZephyr是100%自动校准的,因此在大多数情况下,您此时无需执行任何操作。但是,当您需要调整这些设置时,了解您可以做什么很重要。
在“修改校准”页面中,可以选择要更改的焦距(如果使用其他焦距来拍摄加载的照片),然后定义校准参数。
通过从文件按钮导入参数,您可以加载使用外部应用程序创建的校准文件(例如,旧的3DF Lapyx或3DF Zephyr嵌入式校准工具)。
提示:如果导入的图像是用广角镜或鱼眼镜头拍摄的,并且相机的方向和相位错误,则建议从“修改校准”对话框中激活“调整正切畸变参数”选项。
校准步骤完成后,必须通过“相机方向设置”页面设置3D重建的第一阶段,这将生成稀疏点云作为初始3D结果。
设置3D重建的前三个阶段具有三个设置:
类别和预设:设置重建参数的最快方法;
进阶模式:可让您定义3D重建阶段的每个细节;
自定义模式:允许您修改重构引擎的所有参数,仅适用于专家
类别和预设,高级模式和自定义可用于3D重建的每个阶段,无论是否在上一个阶段中使用。




















![Popims Animator 4.0 免安装版[动画文件制作工具]](http://pic.9upk.com/soft/UploadPic/2016-1/20161271474344536.gif)



