GML Camera Calibration Toolbox是一款专业的相机校准软件。对相机的参数进行校准你可以来试试GML Camera Calibration Toolbox。该软件可以帮助用户校准相机的参数,同时还支持校准后相机的固定参数,这将帮助用户调整它以拍摄质量的照片,并且该软件也可以计算坐标和外部摄像机参数校准模式点,并且用户可以根据计算的信息校准拍摄坐标,每次的美丽时刻都可以实时掌握。此外,该软件还使用棋盘结构的校准模式,使用户可以查看相机的捕获坐标,软件仅使用奇数甚至表单来计算相机的校准参数和坐标,但这是阻碍用户的相机准确校准和计算,在校准相机过程中,软件将自动计算和校准参数,用户不需要手动操作,非常方便快捷,是一种实用性能和功能强大的相机校准软件,欢迎来临下载和使用。
安装方法:
1.找到下载的压缩包并提取它,然后双击“GML Camera Calibration.exe”应用程序以进入安装步骤。

2.选择程序使用的语言。建议选择英语。选择后,单击[确定]按钮进入软件界面。

软件功能:
校准后,计算固体相机参数和失真系数。
还可以计算校准模式点和外部摄像机参数的坐标。
每个参数都有精确度。
GML Camera Cameric Toolbox Green Edition使用棋盘作为校准模式。它仅使用奇数(甚至x奇数)正方形的校准模式(即,5×6,7×8,10x7等)。
校准过程完全自动化。有两个棋盘检测算法。第一是“方形”算法,第二是“孔”算法。
使用说明:
MSU GML Camera校准用户指南

校准
校准
具有图像的源目录
纠正图像目标目录
所有校准图像
非校正变量序列校正径向和切向失真。
单击UNTASTORT - UNISTORTOR目录菜单,然后输入UNTASTORT属性。
相机校准
·外部方形和物体边界之间的空白区域(下图中的红色标记)应至少为1平方宽度,如下所示:
校准模式

·所有方块必须清晰可见(未被封锁)。
·使用三脚架
·25张照片
·使用纸张尺寸“.3”等。
·方形尺寸为3-5厘米
·图像上的棋盘必须位于相机矩阵的所有位置。使用点浓度选项卡来控制校准模式的位置
·棋盘必须是一架飞机
·从棋盘顶部照片

倾斜角度是恒定的(例如,45度)
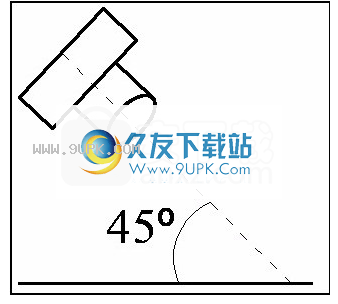
拍摄三张相机位置的照片

导出校准数据 - 表格格式
选择菜单校准 - 导出校准数据 - 表格格式以启动导出过程。

输入导出目录和基本文件后缀。
导出数据包括每个检测到的图像的两个文件。第一个(“image_name _”+“基本文件后缀”+“_ 2d”)包含相应的图像点。第二个(“image_name _”+“基本文件后缀”+“_ 3D”)包含对象点。
例如,检测图像“图像1”的5X6校准图案。
文件“image1_zhang_2d”是
x(1,1)y(1,1)x(1,2)y(1,2)x(1,3)y(1,3)x(1,4)y(1, 4)
X(2,1)y(2,1)x(2,2)y(2,2)x(2,3)y(2,3)x(2,4)y(2,4)
x(3,1)y(3,1)x(3,2)y(3,2)x(3,3)y(3,3)x(3,4)y(3,4)
x(4,1)y(4,1)x(4,2)y(4,2)x(4,3)y(4,3)x(4,4)y(4,4)
5,1)
Y(5,1)x(5,2)y(5,2)x(5,3)y(5,3)x(5,4)y(5,4)
行数为(校准图案宽度 - 1)* 2。
列数是校准模式高度 - 1。
文件“image1_zhang_3d”类似于“image1_zhang_2d”,但点也是坐标z = 0。
导出校准数据 - Willson和Heikkila格式
选择菜单校准 - 导出校准数据 - Willson和Heikkila格式开始导出过程。
导出数据包括每个检测到的图像的文件。此文件包含对象点和相应的图像点。
例如,检测图像“图像1”的5X6校准图案。
文件“image1_wh”是
x(1,1)y(1,1)z(1,1)x(1,1)y(1,1)
x(1,2)y(1,2)z(1,2)x(1,2)y(1,2)
1,3)y(1,3)z(1,3)x(1,3)y(1,3)
x(1,4)y(1,4)x(1,4)y(1,4)
x(2,1)y(2,1)z(2,1)x(2,1)y(2,1)
x(2,2)y(2,2)z(2,2)x(2,2)y(2,2)
......
导出校准数据 - 外部摄像机参数
选择菜单校准 - 导出校准数据 - 外部摄像机参数以启动导出过程。
导出数据包括每个图像的翻译(t)和旋转(r)vectors。
文件格式为:
T(1,1)T(2,1)T(3,1)R(1,1)R(2,1)R(3,1)/ /是第一图像
T(1,1)T(2,1)T(3,1)R(1,1)R(2,1)R(3,1)/是第二图像
......
导出校准数据 - 外部摄像机参数(格式II)
选择菜单校准 - 导出校准数据 - 外部摄像机参数(格式II)启动导出过程。
导出数据包括每个检测到的图像的文件。此文件包含逆外部摄像机矩阵。
文件格式是:
其中R是旋转矩阵,T是平移矢量。
导校准数据 - 内在的摄像机参数
选择菜单校准 - 导出校准数据 - 内置摄像机参数以启动导出过程。
导出数据包含文件。此文件包含内部相机矩阵。
文件格式为:
[FX 0 CX]
[0 FY CY]
[0 0 1]
CX,CY是主要点,FX,FY是焦距。
导出校准数据 - 具有失真的固有相机参数
选择菜单校准 - 导出校准数据 - 具有失真的固有相机参数,以启动导出过程。
导出数据包括两个文件。后缀“内在”中的第一个包含上述格式的固有相机矩阵。第二个具有后缀“失真”并包含四个失真系数(前两个用于径向,第二用于切线失真)。
校准数据 - 板之间的输出转换参数
选择菜单校准 - 导出校准数据板之间的转换参数以启动导出过程。
如果场景中有两个或多个校准对象,则可以使用此过程来保存您的相对位置。
生成的文件格式是:
[DX DY DZ RX RY RZ]
其中(DX DY DZ)是旋转向量,(RX RY RZ)是翻译矢量。这些向量允许从当前对象的坐标系(在“结果”标签中为基础知识的基础知识)的坐标系来坐标系。文件的每一行对应于每个模板(基本模板除外),该行将行添加到模板的顺序到项目。
软件特色:
完整的免费,不要为用户收取任何费用
操作简单,没有复杂的步骤
可以帮助用户校准相机的坐标
此同时,您还可以设置相机的拍摄参数。
支持被驱逐软件,基本文件的后缀,导出的数据包括每个检测到的图像
支持将校准数据导出到计算机以保存,以便用户稍后可以查看它们
外部摄像机的参数可以导出,包括每个图像的翻译(t)和旋转(r)向量